MoveIt!, de-facto standard motion planning library for ROS, now celebrates 5th year since its initial release by an amazing compilation of application videos.
This is the 2nd time MoveIt! maintenance team makes such a montage.
Comparing with the one from 4 years ago back in 2013 soon after the software was just released, we can see many more Pick&Place applications this time.
Also captured my personal interest was that there are some mobile base/subsea rover manipulation apps, which is one of the future improvement items of MoveIt! (see this page “Mobile base integration”). It’d be absolutely a great contribution if the developers of those apps would give back their development to the upstream MoveIt! software.
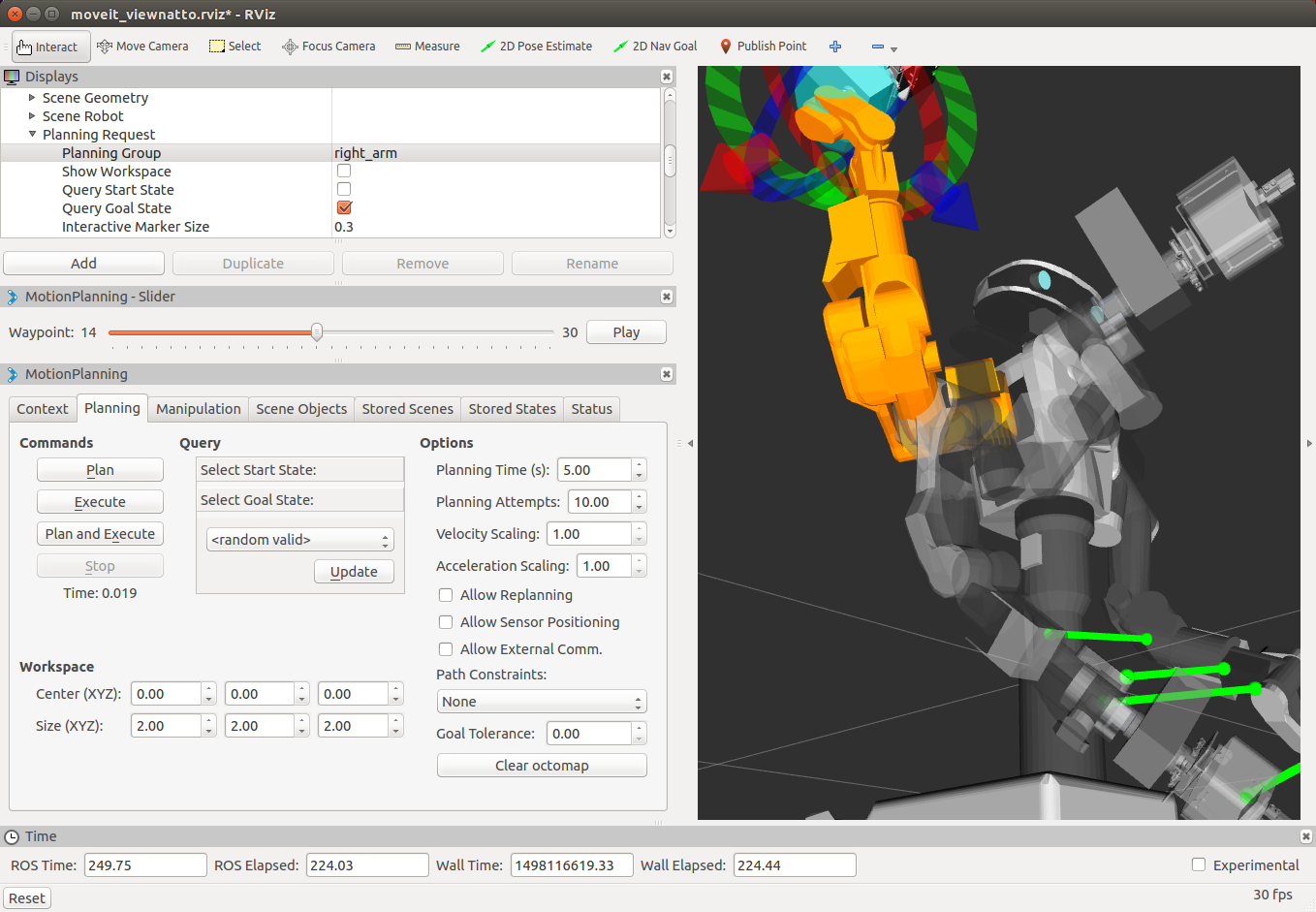
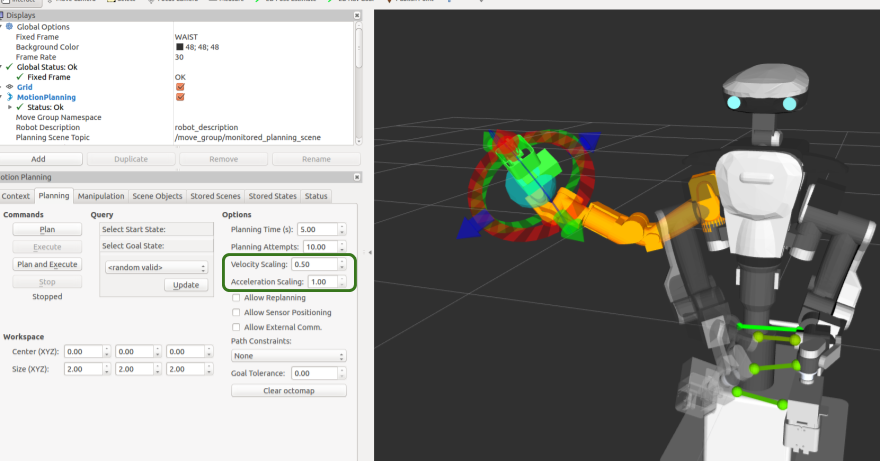
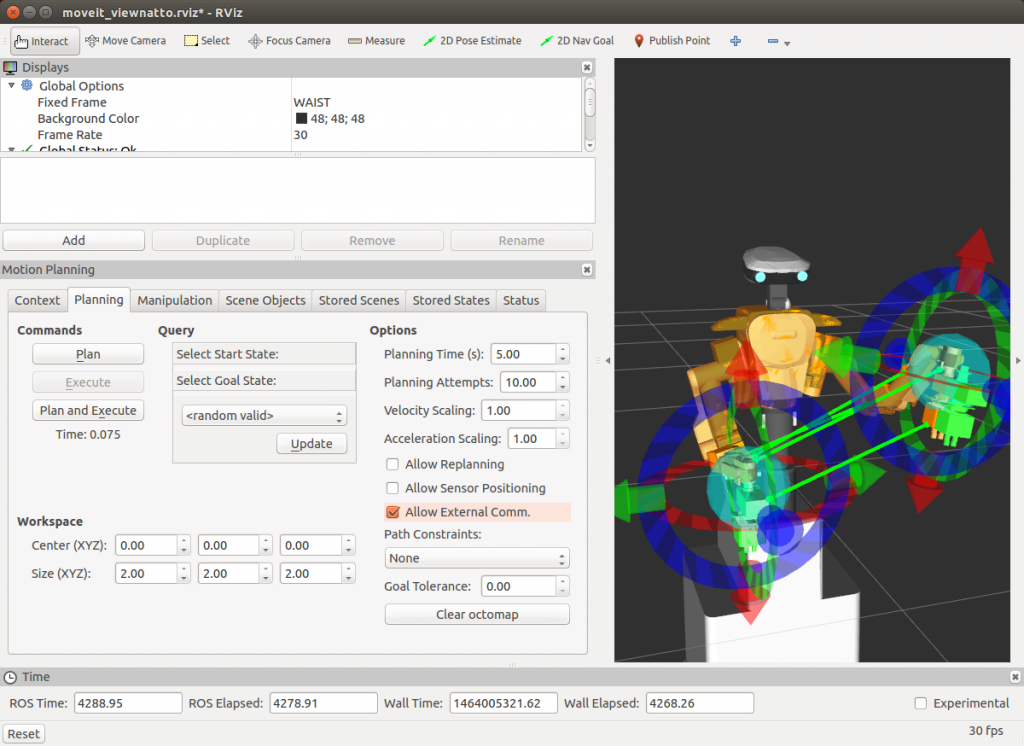
As has always been, NEXTAGE Open, a dual-arm robot that TORK has been actively contributing to its maintenance and providing support service, appears in the video as well thanks to a Spanish system integrator Tecnalia presumably for their work with Airbus.
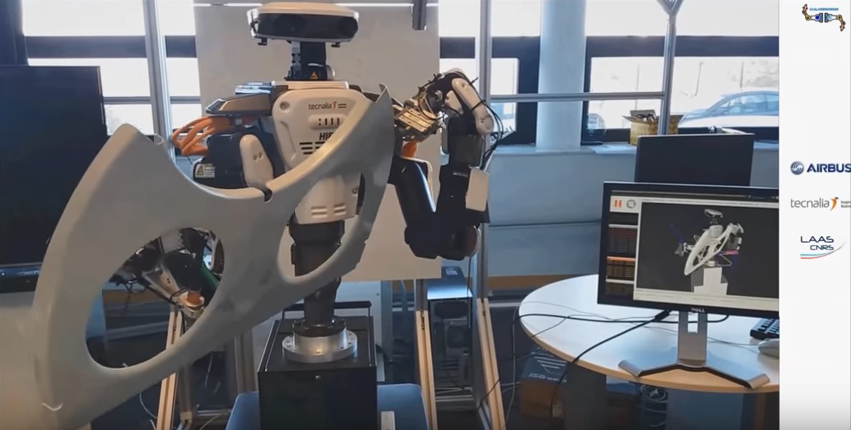
Hironx in motion from MoveIt! 5-year montage by courtesy of Tecnalia
TORK has been a motivated, skillful supporter of ROS and MoveIt! since our launch in 2013. If you’re wondering how you could employ MoveIt! to your robot, please consider our hands-on workshop series too.
P.S. List of all application’s developers are also available as follows:
(0:06) Delft Robotics and TU Delft Robotics Institute
(0:09) Techman Robot Inc.
(0:13) Correll Lab, CU Boulder
(0:37) Nuclear & Applied Robotics Group, Unv Texas
(0:50) Beta Robots
(0:55) GIRONA UNDERWATER VISION AND ROBOTICS
(1:03) Team VIGIR
(1:34) Honeybee Robotics
(1:49) ROBOTIS
(1:58) TECNALIA
(2:05) Correll Lab, CU Boulder
(2:26) TODO Driving under green blocks
(2:38) ROBOTIS
(2:54) Fetch Robotics
(3:05) Hochschule Ravensburg-Weingarten
(3:12) TU Darmstadt and Taurob GmbH – Team ARGONAUTS
(3:20) isys vision
(3:27) Technical Aspects of Multimodal System Group / Hamburg University
(3:33) Clearpath Robotics
(3:43) Shadow Robot