From TORK blog:
ROS device driver for force-torque sensor Dynpick, one that TORK joins its maintenance, has been known to work for a discontinued product only so far. Now someone in the opensource community just confirmed that the package works with a product that’s still available!
Products confirmed to work has been and will be updated on the driver’s wiki page. Report, questions can be posted on its Github page.
And as always, may the power of opensource be with you. Happy holidays!
Wednesday, December 21, 2016
Thursday, December 15, 2016
TORK to co-host Toyota HSR workshop for users
From TORK's blog:

TORK has been partnering with the “HSR” welfare robot’s dev team at Toyota Motors Corporation (TMC). In 2014 and the last year 2015 we worked together with them for the hackathon.
This year we worked with TMC again to host developers workshop at 4 venues in Japan. In addition to going over the robot’s unique features and programming using ROS, we particularly focused on utilizing the online community designated for HSR owners, which TMC initiated in 2015 and maintains by themselves (membership-only as of today). Goal is that participants get hands on experience in interacting on the developers community so that they can accelerate their own development, which also contributes to develop the community size and maturity, which the developers ultimately appreciate. That said the seminar series this time is the beginning of building the community’s life cycle as TMC’s dev team intended.










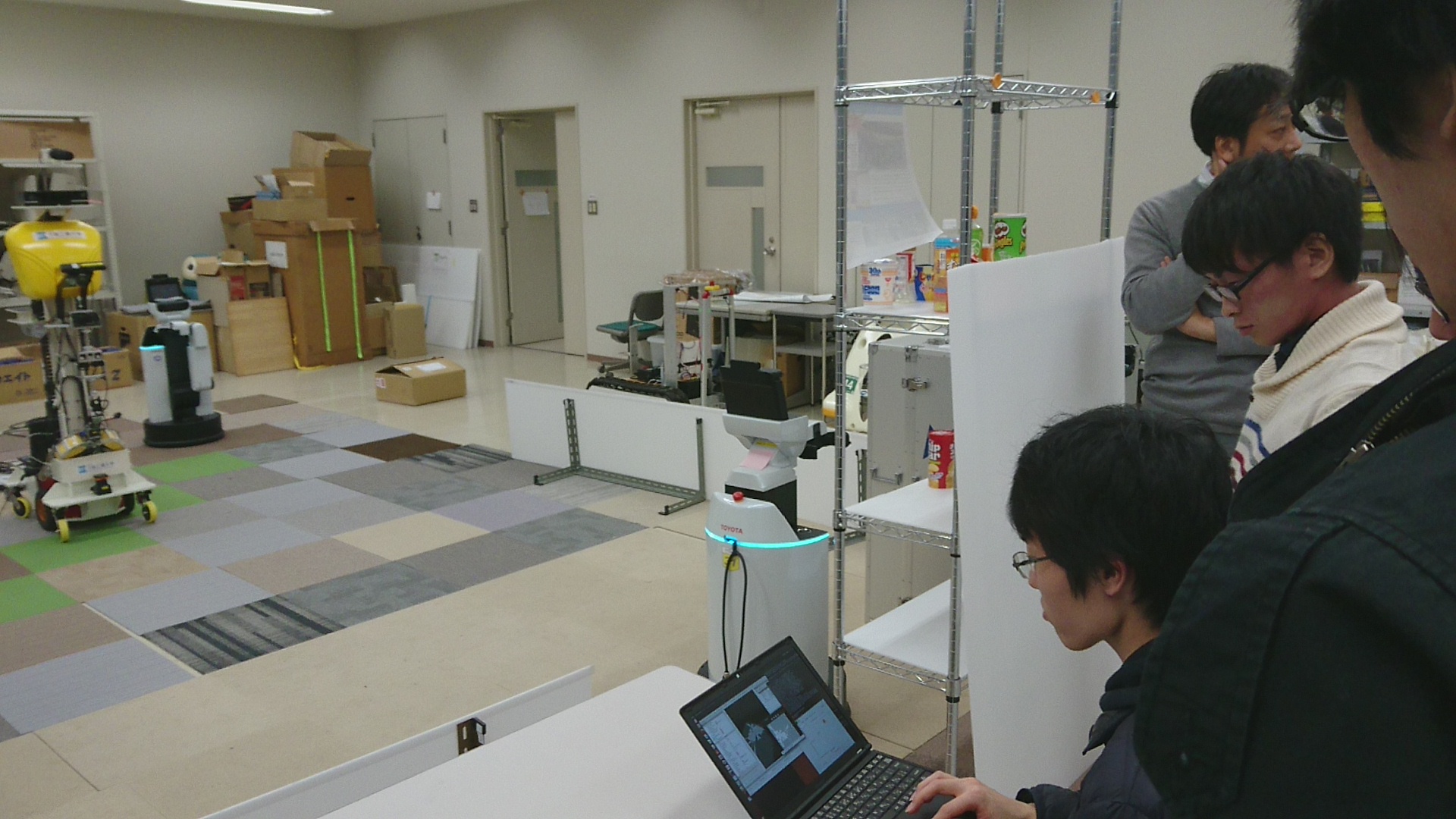





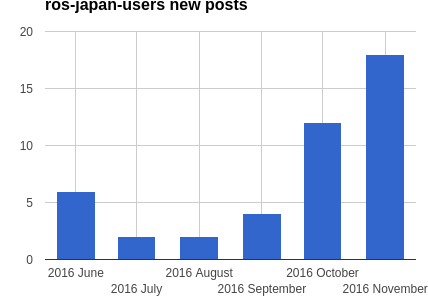
Also discussed is problem isolation – engineers often need to figure out the types of problems and post questions at the best community per incident. This is more an advanced subject, but participants well exceeded our expectation to separately post HSR-specific questions and generic-ROS questions on the forums of each. This may have resulted in the positive spike of the number of posts at the ROS Japanese user groups as you see in the graph below (workshop series started in October).
Closing this blog post with some videos from the code challenge at the end of the workshops (if you're not seeing any video snippet, go to the original blog post). We truly hope that we’ve contributed to the HSR and the world of robotics community by encouraging community involvement.
Friday, September 23, 2016
catkin-tools tip pt.2
From TORK blog
Following our previous post about a nice hidden tip for catkin-tools, here’s another one.
When finishes compilation, `catkin build` shows a pop-up window at the top-right on your screen (if you’re on Ubuntu Linux), which indicates `Build Finished` or `Build Failed`. This is nice in that you can work on another windows without payting attention to catkin’s progress. Caveat is, though, that “Finished” and “Failed” aren’t that obviously differentiating whatsoever.
With the newer version of catkin-tools, 0.4.3 or higher, the window pops up with a distinguishable colors; Green for success and red for failure.
This little but significantly effective change is done by our TORK associates again. The change was made swiftly and neatly as it has always been in the opensource software community.


Following our previous post about a nice hidden tip for catkin-tools, here’s another one.
When finishes compilation, `catkin build` shows a pop-up window at the top-right on your screen (if you’re on Ubuntu Linux), which indicates `Build Finished` or `Build Failed`. This is nice in that you can work on another windows without payting attention to catkin’s progress. Caveat is, though, that “Finished” and “Failed” aren’t that obviously differentiating whatsoever.
With the newer version of catkin-tools, 0.4.3 or higher, the window pops up with a distinguishable colors; Green for success and red for failure.
This little but significantly effective change is done by our TORK associates again. The change was made swiftly and neatly as it has always been in the opensource software community.


Friday, July 1, 2016
Easy Teaching Operation for NEXTAGE Open by MoveIt! Joystick
(From TORK blog)
One of good news about ROS community is that the maintenance of MoveIt! got revitalized where TORK is contributing to as well. In 2016 there has already been three binary update releases so far. No more building from source if you were forced to!
We’ve mentioned about MoveIt! a few times recently ([1],[2]), so do we today again. With the version 0.7.2 (on ROS Indigo), you can operate robot arms by joystick via MoveIt!
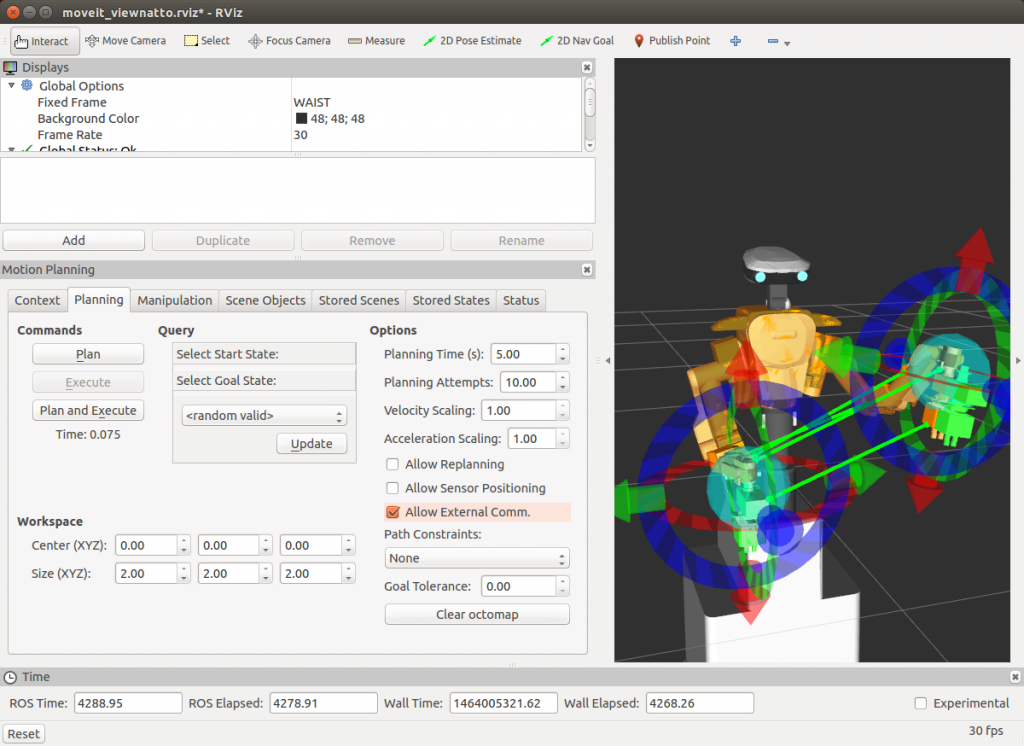
Running the feature is as simple as joystick. On RViz on the host where the joystick is plugged, check “Planning” tab –> “AllowExternalExecution” (see the image below).
Then run a launch file, either the one in your XXXX_moveit_config package if there’s already the aforementioned launch file, or simply make a launch file with the following:
To run on NEXTAGE Open, make sure MoveIt! is running then run a single command below (modify jsX). You can also refer to wiki for joystick usage for NEXTAGE Open.
(At the top window, the human operator plans the movement on RViz visualizer. Once the plan looks good then operator executes the plan so that the simulated robot in the bottom window conducts the movement. This is a screen capture so joystick isn't invisible, but yes, all the robot's movement is commanded from a Sony PS3 joystick.)
One of good news about ROS community is that the maintenance of MoveIt! got revitalized where TORK is contributing to as well. In 2016 there has already been three binary update releases so far. No more building from source if you were forced to!
We’ve mentioned about MoveIt! a few times recently ([1],[2]), so do we today again. With the version 0.7.2 (on ROS Indigo), you can operate robot arms by joystick via MoveIt!

Running the feature is as simple as joystick. On RViz on the host where the joystick is plugged, check “Planning” tab –> “AllowExternalExecution” (see the image below).
Then run a launch file, either the one in your XXXX_moveit_config package if there’s already the aforementioned launch file, or simply make a launch file with the following:
<!-- https://github.com/ros-planning/moveit_setup_assistant/pull/90 -->
<launch>
<arg name="dev" default="/dev/input/js0" />
<!-- Launch joy node -->
<node pkg="joy" type="joy_node" name="joy">
<param name="dev" value="$(arg dev)" /> <!-- Customize this to match the location your joystick is plugged in on-->
<param name="deadzone" value="0.2" />
<param name="autorepeat_rate" value="40" />
<param name="coalesce_interval" value="0.025" />
</node>
<!-- Launch python interface -->
<node pkg="moveit_ros_visualization" type="moveit_joy.py" output="screen" name="moveit_joy"/>
</launch>
For the detail follow the usage page.
To run on NEXTAGE Open, make sure MoveIt! is running then run a single command below (modify jsX). You can also refer to wiki for joystick usage for NEXTAGE Open.
roslaunch nextage_moveit_config joystick_control.launch dev:=/dev/input/js1
(At the top window, the human operator plans the movement on RViz visualizer. Once the plan looks good then operator executes the plan so that the simulated robot in the bottom window conducts the movement. This is a screen capture so joystick isn't invisible, but yes, all the robot's movement is commanded from a Sony PS3 joystick.)
Friday, June 24, 2016
Investigating unexplored region while making a map (frontier_exploration with Turtlebot)
(From TORK blog)
When making a map using ROS, you’re likely tele-operating your robot for every single move via keyboard or joystick at best. But I know a demand exists for “planning” in advance a region that robot explores to make a map.
That’s where a package called frontier_exploration gets useful; it provides ROS actionlib interface, through which users can send the location to explore. We just made a sample using Turtlebot to show how to integrate frontier_exploration package into your own robot. Resulted package can be seen at turtlebot_samples. As the following movie (It’s long! You’re warned…) shows, you can run by a single command Gazebo simulator, spawn Turtlebot on a sample map and send a command for the exploration.
You set the region to be visited by drawing a polygon on RViz, then after clicking a point within the polygon robot will move. Once it starts moving user isn’t sending anything (robot moves autonomously to the given goal along the computed path).
Shorter video is also available (it’s not Turtlebot. Video was taken by the original developer of the frontier_exploration package)
In these videos the robot is commanded manually on RViz window. You can also send commands programmatically using its API.
So far we confirmed that frontier_exploration can be applied to the robots with gmapping and move_base (incorporating with other navigation packages may be as simple?).
When making a map using ROS, you’re likely tele-operating your robot for every single move via keyboard or joystick at best. But I know a demand exists for “planning” in advance a region that robot explores to make a map.
That’s where a package called frontier_exploration gets useful; it provides ROS actionlib interface, through which users can send the location to explore. We just made a sample using Turtlebot to show how to integrate frontier_exploration package into your own robot. Resulted package can be seen at turtlebot_samples. As the following movie (It’s long! You’re warned…) shows, you can run by a single command Gazebo simulator, spawn Turtlebot on a sample map and send a command for the exploration.
You set the region to be visited by drawing a polygon on RViz, then after clicking a point within the polygon robot will move. Once it starts moving user isn’t sending anything (robot moves autonomously to the given goal along the computed path).
Shorter video is also available (it’s not Turtlebot. Video was taken by the original developer of the frontier_exploration package)
In these videos the robot is commanded manually on RViz window. You can also send commands programmatically using its API.
So far we confirmed that frontier_exploration can be applied to the robots with gmapping and move_base (incorporating with other navigation packages may be as simple?).
Tuesday, June 7, 2016
Thanks to opensource community, issue with NEXTAGE Open software (3D model geometry, tf) got resolved promptly
(From TORK's blog)
A user reported an issue in tf with NEXTAGE Open software that got resolved in a quick fashion thanks to opensource collaboration across organizations/userbases. Binaries (the ones installable by apt-get) including the fix is already available online. Please see more detail of the issue and how to apply the fix this ticket on github.
We, TORK, thinks without any doubts that the big advantage of making software public is that you get testers from across the globe. The fix this time is a true realization of this opensource dogma; if I review the ticketed report for this issue on github now, you’ll see the flow:
Going further, once the fix is pulled then it’s also important to make the fix easily accessible by the users. Having them as binary form is the way to go. We do that by relying on the platform the ROS maintenance team (OSRF) runs, as have we already done so. Steps for that is really simple (*1):
*1 Initial release takes a bit more steps. But once done so it’s really easy!
A user reported an issue in tf with NEXTAGE Open software that got resolved in a quick fashion thanks to opensource collaboration across organizations/userbases. Binaries (the ones installable by apt-get) including the fix is already available online. Please see more detail of the issue and how to apply the fix this ticket on github.
We, TORK, thinks without any doubts that the big advantage of making software public is that you get testers from across the globe. The fix this time is a true realization of this opensource dogma; if I review the ticketed report for this issue on github now, you’ll see the flow:
- A user reported the issue.
- –> Someone from robot’s manufacturor gave a comment.
- –> Another heavy user commented.
- –> Maintainer (us) created a fix candidate.
- –> Reporter user tested fix candidate and confirmed that it fixes.
- –> Maintainer pulled in the fix.
Going further, once the fix is pulled then it’s also important to make the fix easily accessible by the users. Having them as binary form is the way to go. We do that by relying on the platform the ROS maintenance team (OSRF) runs, as have we already done so. Steps for that is really simple (*1):
- Submit a request for generating a binary (submission from this time)
- –> Announcement by OSRF that the binaries are ready (announcement made this time by OSRF)
*1 Initial release takes a bit more steps. But once done so it’s really easy!
Wednesday, March 16, 2016
Impedance Control using Kawada’s Hironx Dual-arm Robot
From TORK's blogpost:
A robot at Manipulation Research Group at AIST (Japan) is equipped with JR3 6-axis force sensor at the tip of the arms. Using the external force measurement from the sensor, impedance control is achieved to restrain the pose of the robot’s end-effector.
Interested users can take a look at this wiki page for how to configure your driver. Technically you can use other types of force sensors.
Need customization? Please contact us.
Impedance Control using Kawada’s Hironx Dual-arm Robot
Here’s an advanced usecase of NEXTAGE Open (Hironx) robot.A robot at Manipulation Research Group at AIST (Japan) is equipped with JR3 6-axis force sensor at the tip of the arms. Using the external force measurement from the sensor, impedance control is achieved to restrain the pose of the robot’s end-effector.
Interested users can take a look at this wiki page for how to configure your driver. Technically you can use other types of force sensors.
Need customization? Please contact us.
Friday, March 11, 2016
ROS Workshop at Municipality (by TORK)
(From TORK's website)
ROS Workshop at Municipality
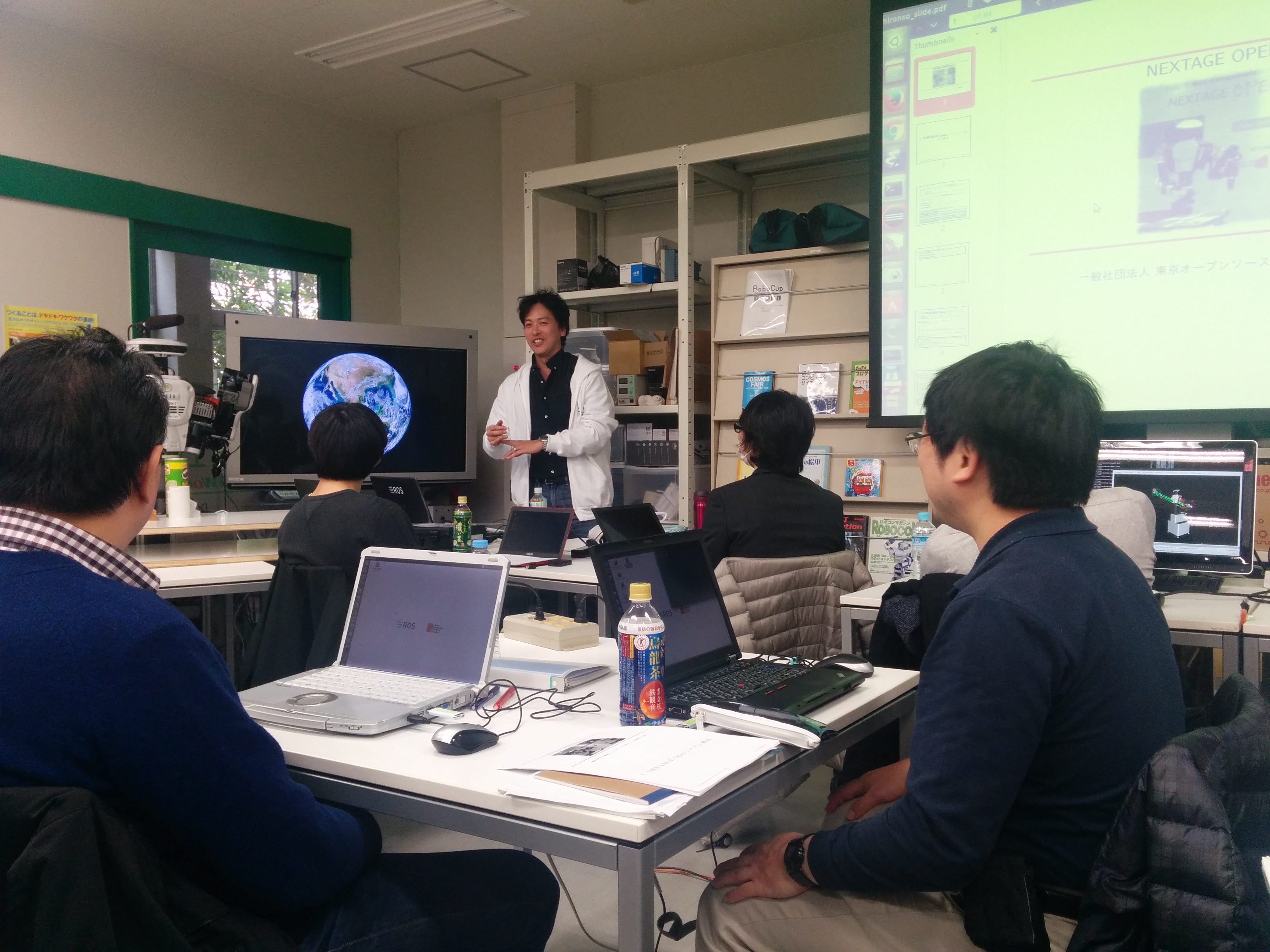
We held ROS Workshop at Sagamihara ROBOT SUPPORT CENTER (SIC) and Okada-Lab at Tamagawa University on 16th, 30th Jan, and 6th Feb.SIC is an industrial training facility in the city of Sagamihara in Kanagawa prefecture, where global and local businesses are located in electronics and heavy industry (incl. Mitsubishi Heavy Industries, Caterpillar Japan, 3M, Nissan, JAXA (Japanese Aerospace Agency)). The center aims to assist the local economy by providing training and support for the robotics technologies.
We, TORK, have been holding technical workshop for opensource robotics for several dozen times at different levels (this, this, this, and this to name a few). This time we worked with SIC to give a series of dedicated workshop for the engineers and managers from the local tech companies.
The contents consists of following three parts. We also would like to thank to students from Okada-Lab@Tamagawa University for their assistance.
- 1. ROS Workshop for beginners.
- Learning basics of ROS system through the hands-on workshop.
- ROS Setup
- Recognition human hand with vision sensor(LeapMotion)
- Recognition based motor control
- Learning basics of ROS system through the hands-on workshop.
- 2. ROS Workshop for intermediates
- Learning how to control original
robot arm. This tutorial uses original manipulator using Dynamixel servo
motors. Learn how to create URDF model and MoveIt Setup.
- Robot arm modeling and visualization
- Connecting real robot and robot on rviz
- Control simulated robot on rviz using MoveIt!
- Control real robot using MoveIt!
- Recognizing AR marker and transformations
- Wringing vision based robot motion control program
- Learning how to control original
robot arm. This tutorial uses original manipulator using Dynamixel servo
motors. Learn how to create URDF model and MoveIt Setup.
- 3. ROS + Nextage/HIRO Dual-arm robot
- Learning ROS and OpenRTM using HIRO robots, including how to plan motions using MoveIt!, using Kinect Depth sensor for realtime obstacle avoidance, grasping object using hand-eye cameras.


Subscribe to:
Posts (Atom)