TORK has been partnering with the “HSR” welfare robot’s dev team at Toyota Motors Corporation (TMC). In 2014 and the last year 2015 we worked together with them for the hackathon.
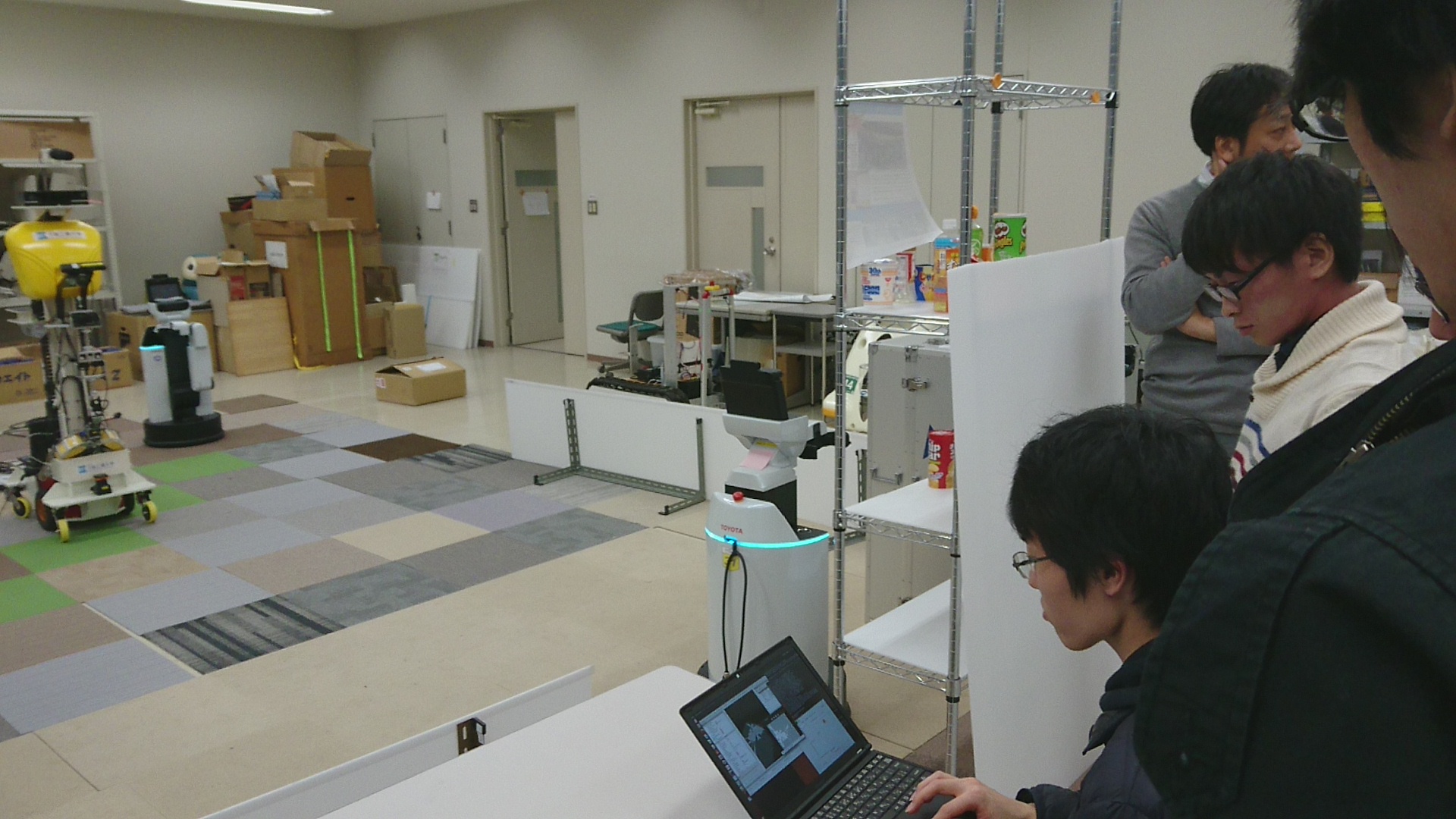
This year we worked with TMC again to host developers workshop at 4 venues in Japan. In addition to going over the robot’s unique features and programming using ROS, we particularly focused on utilizing the online community designated for HSR owners, which TMC initiated in 2015 and maintains by themselves (membership-only as of today). Goal is that participants get hands on experience in interacting on the developers community so that they can accelerate their own development, which also contributes to develop the community size and maturity, which the developers ultimately appreciate. That said the seminar series this time is the beginning of building the community’s life cycle as TMC’s dev team intended.















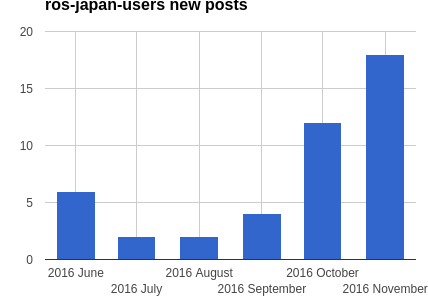
Also discussed is problem isolation – engineers often need to figure out the types of problems and post questions at the best community per incident. This is more an advanced subject, but participants well exceeded our expectation to separately post HSR-specific questions and generic-ROS questions on the forums of each. This may have resulted in the positive spike of the number of posts at the ROS Japanese user groups as you see in the graph below (workshop series started in October).
Closing this blog post with some videos from the code challenge at the end of the workshops (if you're not seeing any video snippet, go to the original blog post). We truly hope that we’ve contributed to the HSR and the world of robotics community by encouraging community involvement.
No comments:
Post a Comment