(From TORK's website)
We held ROS Workshop at
Sagamihara ROBOT SUPPORT CENTER (SIC) and
Okada-Lab at Tamagawa University on 16th, 30th Jan, and 6th Feb.
SIC is an industrial training facility in the
city of Sagamihara
in Kanagawa prefecture, where global and local businesses are
located in electronics and heavy industry (incl. Mitsubishi Heavy Industries, Caterpillar Japan, 3M, Nissan, JAXA (Japanese Aerospace Agency)). The center aims to assist the
local economy by providing training and support for the robotics
technologies.
We, TORK, have been holding technical workshop for opensource robotics for several dozen times at different levels (
this,
this,
this, and
this
to name a few). This time we worked with SIC to give a series of
dedicated workshop for the engineers and managers from the local tech
companies.
The contents consists of following three parts. We also would like to
thank to students from Okada-Lab@Tamagawa University for their assistance.
- 1. ROS Workshop for beginners.
- Learning basics of ROS system through the hands-on workshop.
- ROS Setup
- Recognition human hand with vision sensor(LeapMotion)
- Recognition based motor control
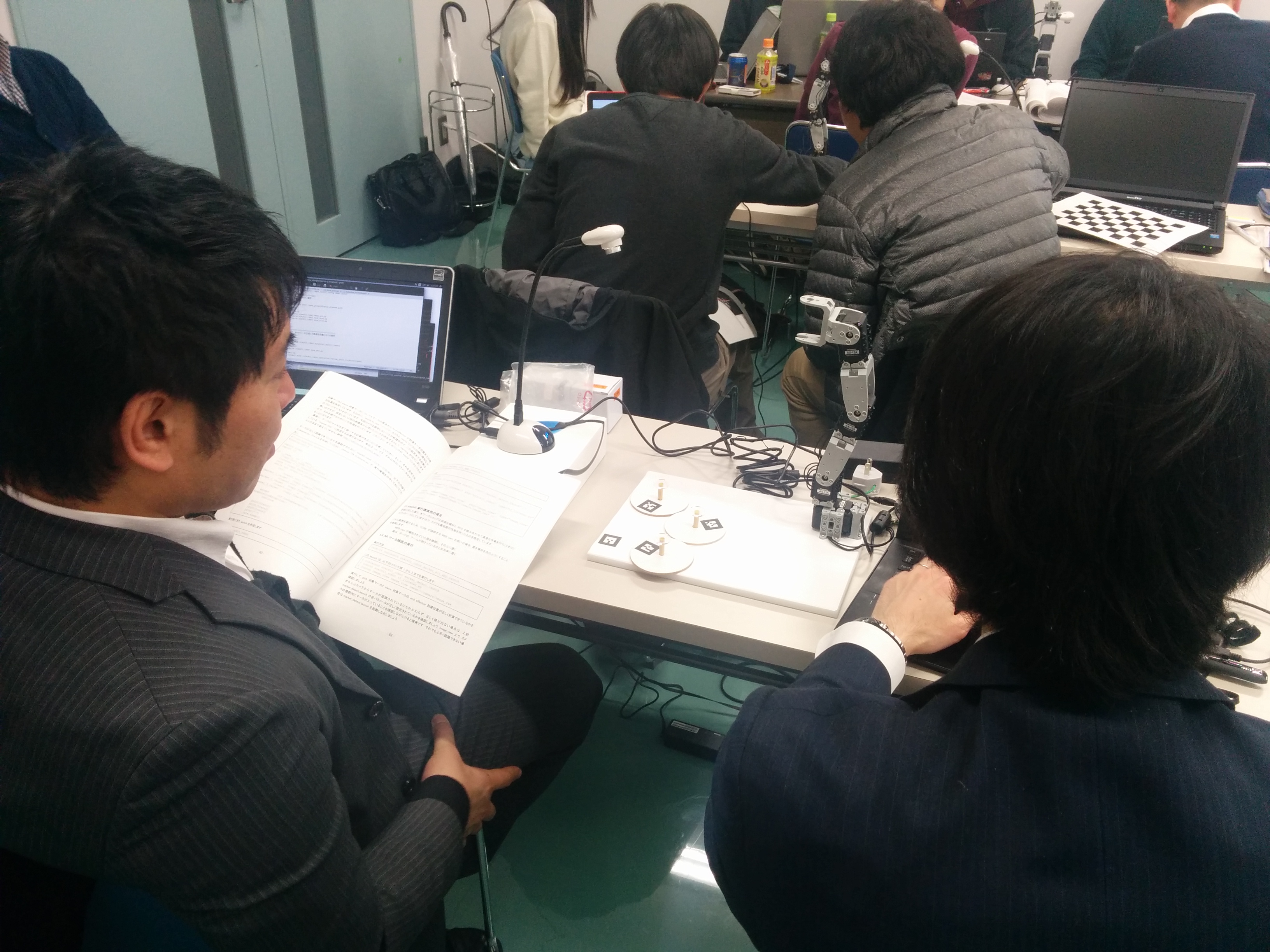
- 2. ROS Workshop for intermediates
- Learning how to control original
robot arm. This tutorial uses original manipulator using Dynamixel servo
motors. Learn how to create URDF model and MoveIt Setup.
- Robot arm modeling and visualization
- Connecting real robot and robot on rviz
- Control simulated robot on rviz using MoveIt!
- Control real robot using MoveIt!
- Recognizing AR marker and transformations
- Wringing vision based robot motion control program
- 3. ROS + Nextage/HIRO Dual-arm robot
- Learning ROS and OpenRTM using HIRO robots, including how to plan
motions using MoveIt!, using Kinect Depth sensor for realtime obstacle
avoidance, grasping object using hand-eye cameras.